I-Les forces mises en jeu dans l'analyse de la marche
1) L’analyse spatio-temporelle de la marche
L’analyse spatio-temporelle est caractérisée par la longueur de la foulée, la durée du cycle de marche et la durée du déroulement de l’appui.
2) L’analyse cinématique de la marche
L’analyse cinématique est l’étude de l’effet des forces, comme le déplacement, la vitesse et l’accélération.

Dans la première étape, le pied est positionné à plat sur le sol, on l’appelle la phase d’appui. L’individu exerce une force qui est égale à sa masse et qui est supportée par l’emboiture schématisée dans cette modélisation en fibre de carbone. Le moignon est en suspension grâce à un système hydraulique. Le genou est bloqué pour permettre à l’individu de garder son équilibre. L’angle de flexion est égal à 17°.
Dans un second temps, la jambe gauche est en avant et la jambe droite commence progressivement à se plier ; la marche débute. La jambe amputée exerce un mouvement de balancer. L’élévation du talon est caractérisée quand la cheville du pied prothétique s’incline grâce à un mécanisme de verrou, sous la pression. Dès lors le genou est relativement tendu, nous remarquons que l’angle de flexion est proche de 0°.
La troisième étape est appelée la phase pendulaire qui est provoquée par l’envoi du moignon vers l’avant, comme si l’individu avait une jambe valide. La prothèse est en suspension, ce qui signifie qu’elle n’est plus en contact avec le sol. Lorsque la jambe valide atteint le sol, le genou prothétique réalise un mouvement de balancier qui ralentit progressivement grâce à des freins hydrauliques, ce mécanisme devient alors automatique et permet de stabiliser l’individu. L’angle de flexion est égal à 65°.
Dans la dernière étape, la prothèse renoue progressivement contact avec le sol. Ainsi, la prothèse retrouve la phase d’appui initiale et la marche devient fluide.
3) L’analyse dynamique de la marche
La dynamique est l’étude des forces qui agissent sur un système matériel, ici la prothèse. Les principes mécaniques utilisés sont les lois de Newton qui sont les suivantes :
- Première loi de Newton ou le principe d’inertie : Si un objet est au repos ou que son mouvement est rectiligne uniforme, alors la somme des forces extérieures qui s'exercent sur lui est nulle, et réciproquement :
![]()
- Deuxième loi de Newton ou le théorème du centre d’inertie : La somme vectorielle des forces appliquées à un objet ponctuel est égale au produit de la masse de l’objet par son vecteur accélération :
![]()
- Troisième loi de Newton ou le principe des actions réciproques : Si un objet A exerce une force sur un objet B, alors cet objet B exerce une force sur A de même direction, de même intensité, mais de sens opposé :

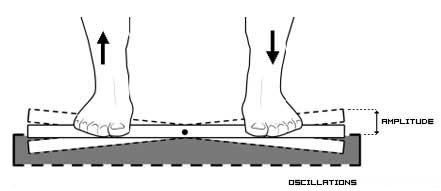
Nous utilisons le système d’une plate-forme de force pour enregistrer les forces transmises par le corps humain au plateau. Ces forces sont constituées par le poids et les actions de contact entre sol et surface plantaire.